Археологическая разведка Луны: результаты проекта SAAM
|
Archaeological Reconnaissance of the Moon:
Results of SAAM Project
A.V. Arkhipov
(rai@ira.kharkov.ua)
Institute of Radio Astronomy, Nat. Acad. Sci. of Ukraine
(Материалы конференции "SETI-XXI")
Our Moon is a
potential indicator of a possible alien presence near the Earth at
some time during the past 4 billion years. To ascertain the presence
of alien artifacts, a survey for ruin-like formations on the Moon
has been carried out as a precursor to lunar archaeology. Computer
algorithms for semi-automatic, archaeological photo-reconnaissance
are discussed. About 80,000 Clementine lunar orbital images have
been processed, and a number of quasi-rectangular patterns found.
Morphological analysis of these patterns leads to possible
reconstructions of their evolution in terms of erosion. Two
scenarios are considered: 1) the collapse of subsurface
quasi-rectangular systems of caverns, and 2) the erosion of hills
with quasi-rectangular lattices of lineaments. We also note the
presence of embankment-like, quadrangular, hollow hills with
rectangular depressions nearby. Tectonic (geologic) interpretations
of these features are considered. The similarity of these patterns
to terrestrial archaeological sites and proposed lunar base concepts
suggest the need for further study and future in situ exploration.
1. Introduction
The idea of
lunar archaeology was discussed long before space flight. In the
1930s, J.Wyndham (alias J.Beynon) wrote "The Last Lunarians" - a
fictional report about an archaeological mission to the Moon
[1]. In writing
about the discovery of an ancient lunar artifact in the short story,
The Sentinel
, Arthur C. Clarke
said: "There are times when a scientist must not be afraid to make a
fool of himself" [2]. Today, the
idea of exploring the Moon for non-human artifacts is not a popular
one among selenologists. Yet, because we know so little about the
Moon, the investigation of unusual surface features can only add to
our knowledge. When we return to the Moon, it is possible that lunar
archaeological studies may someday follow.
It has been
argued [3], [4] that the Moon
could be used as an indicator of extraterrestrial visits to our
solar system. Unfortunately, the detection of ET artifacts on the
Moon is outside the interest of most selenologists due to their
orientation towards natural formations and processes. It is also not
of interest to mainstream archaeologists, as archaeology tends to
adhere to a pre-Copernican geocentric point-of-view.
In 1992, the
Search for Alien Artifacts on the Moon (SAAM) - the first
privately-organized archaeological reconnaissance of the Moon - was
initiated. The justifications of lunar SETI, the wording of specific
principles of lunar archaeology, and the search for promising areas
on the Moon were the first stage of the project (1992-95).
Preliminary results of lunar exploration [5] show that the
search for alien artifacts on the Moon is a promising SETI-strategy,
especially in the context of lunar colonization plans. The aim of
the second stage of SAAM (1996-2001) was the search for promising
targets of lunar archaeological study. The goals of this second
stage involved 1) developing new algorithms for space archaeological
reconnaissance, 2) using these algorithms to detect possible
archaeological sites on the Moon, and 3) examining the reaction of
mainstream scientists to these results.
2. Methodology
It is
generally accepted that the search for alien artifacts on the Moon
is not necessary because there are none. Circular logic leads to a
deadlock: no finds, hence no searches, hence no finds, etc. Given
the success in using terrestrial remote sensing to find
archaeological sites on Earth, can similar techniques be used to
find possible artificial constructions on the Moon and other
planets? Hardly, if planetologist think only in terms of natural
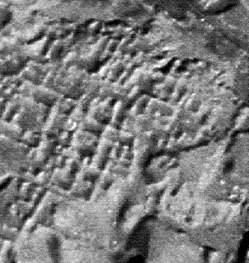
formations. For example, the ancient Khorezmian fortress
Koy-Krylgan-kala in Uzbekistan, constructed between the 4th century
BC to the first century AD, appeared as an impact crater before
excavation in 1956 (Fig. 1). On the Moon, Koy-Krylgan-kala would not
be perceived among all of the impact craters.
 |
| Fig. 1. The ancient Khorezmian fortress Koy-Krylgan-kala appeared as an impact crater on the air photo (left); its artificiality is obvious after the excavations in 1956 (right) [6]. |
Instead of
the current presumption that all surface features are natural, an
alternative search strategy is to be open to the possible existence
of artifacts. If we are open to this possibility, then one can
extend Carl Sagan's search criteria for detecting signs of life on
Earth [7] to other
planets:
"Let us first imagine a photographic
reconnaissance by orbiter spacecraft of the Earth in reflected
visible light. We imagine we are geologically competent but have no
prior knowledge of the habitability of the Earth. Photography of the
Earth at a range of surface resolutions down to 1 km reveals a great
deal that is of geological and meteorological interest, but nothing
whatever of biological interest. At 1 km resolution, even with very
high contrast, there is no sign of life, intelligent or otherwise,
in Washington, London, Paris, Moscow, or Peking. We have examined
many thousands of photographs of the Earth at this resolution with
negative results. However when the resolution is improved to about
100 m, a few hundred photographs of say 10 km x 10 km coverage are
adequate to uncover terrestrial civilization. The patterns revealed
at 100 m resolution are the agricultural and urban reworking of the
Earth's surface in rectangular
arrays... These patterns would be extremely
difficult to understand on geological grounds even on a highly
faulted planet. Such rectangular arrays are clearly not a
thermodynamic or mechanical equilibrium configuration of a planetary
surface. And it is precisely the departure from thermodynamic
equilibrium which draws our attention to such photographs."
In 1962 Sagan
spoke on the possibility of discovering alien artifacts on the Moon
stating that "Forthcoming photographic reconnaissance of the moon
from space vehicles - particularly of the back - might bear these
possibilities in mind." [8]
Rectangular patterns on air-space photos are recognized as signs of human
culture in the remote sensing of the Earth and air archaeology
[9]. It seems
reasonable then to search for rectangular patterns on the Moon. For
example, assume that the equivalent of proposed modern lunar bases
were built long ago (e.g., 1-4 billion years ago) on the Moon. Such
structures would have been built under the surface for protection
from ionizing radiation and meteorites. Today these ancient
structures might appear as eroded systems of low ridges and
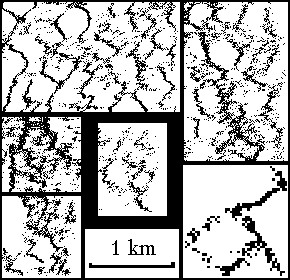
depressions, covered by regolith and craters (Fig. 2).
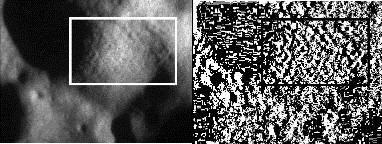
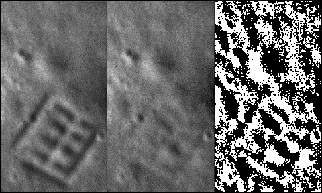 |
| Fig. 2. Simulation of probable HIRES view of ancient settlement on the Moon (left). The erosion wipes off the surface tracks of construction (center), but the SAAM processing could reveal the rectangular anomaly (right). |
A wealth of
lunar imagery collected by the Clementine probe are available in
digital form [10]. Initial
SETI studies [11] used images
from the ultraviolet-visible (UVVIS) camera. The resolution of UVVIS
images is ~200 m. According to Sagan's detection criteria, this
resolution would not be sufficient even to detect the presence of
our own civilization on Earth. Studies of the Moon at this
resolution would probably not reveal any convincing evidence of the
existence of artificial structures. On the other hand, Clementine's
high-resolution (HIRES) camera produced images of adequate
resolution (9-27 m), but they are much more numerous (~ 600,000
images total) and they are thus largely unstudied. The next section
discusses algorithms for automatically scanning large numbers of
HIRES images for potential artifacts.
3. Algorithms
3.1. Preliminary Fractal Test
As a rule,
the structure of natural landscapes is self-similar over a range of
spatial scale. For example, lunar craters between 10-1 m
to 10 4 m in
size appear similar in structure. In contrast to the self-similar
structure of natural features, the structure of artificial objects
is expressed over a narrower range of scale. Hence, possible
artifacts in an image might be recognized as anomalies in the
distribution of spatial detail as a function of scale. The search
for such anomalies is the essence of the fractal method proposed by
M.C. Stein and M.J. Carlotto [12], [13].
Unfortunately their method is too computationally-intensive to
process all of the candidate HIRES images (~80,000).
An
alternative algorithm that is simpler and faster was used for the
same purpose. Let M(r) be the probability distribution of the
distances between local minima in brightness along horizontal lines
in an image. M(r) thus provides a measure of the size distribution
of image detail. At long scales, this function can be approximated
by the fractal power law:
| (1) |
As artificial
objects have some typical size, their presence should increase the
squared residuals of linear regression:
| (2) |
where C is a
constant. According to empirical results, M(r) of the HIRES images
can be approximated by a power law at r > 4 pixels. The regression
is calculated from 4 < r < 31 pixels
(i.e., over a scale range from 50 to 900m).
Images are
divided into K=12, 96x96 pixel regions. In each region the best
model parameters are calculated by least squares, and the average of
the squared residuals determined:
| (3) |
where k is
the number of the test square, gk compensates for gain variations across the sensor, and N is
the number of scales. The average dispersion is estimated from these
regional squared residuals.
An analysis
of 733 HIRES images using the 0.75 micrometer filter, from orbits
112-115 (up to 75 deg. latitude) shows the distribution of residuals
to be Gaussian in form. According to the Student's criterion for
K=12 estimates, if the inequality
| (4) |
is true in
any test square, this area could be considered as statistically
anomalous with a probability of 0.95.
3.2. Detailed Fractal Test
A modified
version of Stein's fractal method was used as a more detailed test.
First, the range of HIRES image brightness was increased linearly up
to 256 gradations. Then the image could be considered as an
intensity surface in a 3-D rectangular frame of coordinates (x and y
are the pixel coordinates, and z the brightness). Stein's method can
be thought of as enclosing the image intensity surface in volume
elements. These volume elements are cubes with a side of 2r, where r
is the scale in terms of pixel coordinates or brightness. Let V(r)
be the average minimal volume of such
elements enclosing an image intensity surface at some point. Then
the surface area is A(r) = V(r)/2r.
As a function of scale, A(r) characterizes the size distribution of
image details. The fractal linear relation between log A(r) and log
r is a good approximation for natural landscapes. However, fractals
do not approximate artificial objects as a rule. This is why Stein
used the average of the squared residuals of the linear regression
| (5) |
as a measure
of artificiality. Unfortunately, the value of the squared residuals
depends on the number of pixels in an image. Therefore, it is
difficult to compare images with different sizes. Moreover, shadows
increase the residuals and generate false alarms. These problems can
be resolved by the non-linear regression:
| (6) |
where the
'artificiality parameter' "alpha" is independent of the
image size.
Fig. 3 plots
alpha of a random set of images representing the natural
lunar background (crosses), and the set of images containing
anomalous objects (squares). The shadows lead to values of
alpha greater than zero, but anomalous objects have values
less than zero. At any Solar zenith angle, Zsun the anomalous
formations have systematically lower alpha than the random
set of HIRES images. The average linear regression relating
alpha of the random set and Zsun is shown as a dashed line where the standard deviation of the
crosses from this regression is 0.0113. A deviation of 3 sigma
(solid line) is adopted as a formal criterion for the final
selection of candidate objects.
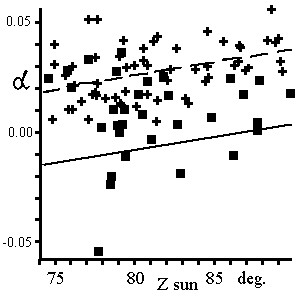 |
| Fig. 3. Selection of lunar features based on 'artificiality parameter' alpha |
3.3. Rectangle Test
The rectangle
test reveals rectangular patterns of lineaments on the lunar
surface. For each pixel of the image, a second pixel at a distance
of 6 pixels and a given position angle is selected. Let N be the
total number of pixel pairs, and n be the number of pairs where the
pixel brightnesses are equal. The function
| (7) |
characterizes
the anisotropy of the image in terms of position angle. To correct
for camera effects it is normalized by its average over many images.
The anisotropy is smoothed and position angle maxima are found. The
maxima are the orientations of lineament groups. If there are 90
deg. ? 10 deg. differences between maxima, the image is classified
as interesting.
3.4. SAAM Transformation
To aid in
false alarm rejection, the SAAM transformation (Fig. 2) of the image
was used to enhance subtle details of the lunar surface. This
transformation involves smoothing the image over a sliding circular
window of radius R, and subtracting the result from the initial
image. Pixel that are brighter than the smoothed level (difference
greater than zero) are labeled as 'white'; the others are 'black'.
Clipping helps us to see details of both low and high contrast.
Moreover, large details (greater than R in size) are de-emphasized
and so do not interfere with smaller-sized features.
3.5. SCHEME Algorithm
The SCHEME
algorithm searches for local extremities of lunar relief. It does so
by detecting peaks in the image intensity surface in the direction
of the sun. An example of the SCHEME algorithm is shown in Fig. 4.
 |
| Fig. 4. The image LHD0331A.062 and a map of relief extremities found by the SCHEME algorithm. |
3.6. Geological Test
J. Fiebag has
suggested that when parallelism exists between a structure and the
lineaments of its surroundings, it is likely to be natural [14]. Although
human activities do sometimes correlate with geological lineaments
(e.g. rivers), the conservative Fiebag test was applied to the lunar
finds.
The lineament
orientation of surroundings was estimated by the rectangle test
technique applied to the ultraviolet-visible (UVVIS) camera. The
UVVIS image covers 196 times the HIRES area with the same 0.75
micrometer filter. Only peaks in the anisotropy (Eq. 7) with
statistical significance of greater than 0.9 were taken into
account. If one of the two directions of the rectangular formation
on a HIRES-image is within 10 deg. of any significant UVVIS
direction, the object is not considered as interesting. This test
rejects about 60% of finds.
4. Finds
4.1. Catalogue
Only the
polar HIRES images of 75 deg. to 90 deg. latitudes were processed in
our survey because of their oblique lighting. The preliminary
fractal, rectangular, geological tests and the SAAM filter were used
with two additional tests:
- Shadow Filter - In order to reduce false alarms
excessively shadowed images were discarded. If more than 5% of
pixels are dimmer than 10% of the maximum brightness amplitude,
that image was ignored. Files of less than 13 KB size were
discarded as well.
- FREX - For filtering of shadow interference
after the preliminary fractal test, the following procedure was
used: The "artificiality parameter" (alpha) was computed as
in Section 3.2 section, but for only 1 of every 5 points to speed
up the analysis of the images. The average linear regression
relating alpha of the random image set and zenith angle
of the Sun was calculated by this simple algorithm. If the value
of alpha for an image was lower than the regression value
minus 1/2 of its standard deviation, the image was selected.
The
preliminary fractal test, shadow filter, FREX and rectangular tests
selected ~5% of the images as interesting. The selected files were
SAAM filtered and tested visually. About 97% of the selections were
ignored after SAAM testing. The remaining 128 finds are catalogued.
Only 47 catalogued images were retained after the geological test.
Their orientations were different by 10 deg. or more from
significant directions of background lineaments. Finally, only 18 of
these 47 images were selected as most interesting by the full
fractal test. Their alpha values deviate from the
regression line for 100 random images by more than 3 standard
deviations.
The images of
highest interest are shown in Table 1. (The full set of images are
listed in Appendix with the images of highest interest shown in
bold.) The finds in the catalogue are described as systems of simple
quasi-rectangular elements: depressions (d), furrows (f), quadrangle hills
(h), rectangular patterns of craterlets (p), and ridges (r). Thus,
an abbreviation such as 'dr' in the last column is a system with
quasi-rectangular depression(s) and quasi-rectangular ridges. This
method of description is convenient for morphological analysis.
|
Table 1. Catalogue of highest interest finds | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Concerning
the lower-ranked images, it is noted that human activity sometimes
correlates with geological lineaments (e.g. valleys, rivers,
deposits around faults, and others) as mentioned earlier. That is
why a negative result of the geological test does not necessarily
indicate a natural object. A positive result would, however, provide
further evidence of artificiality. Similarly, eroded objects could
be of low contrast in orbital imagery. Their fractal properties
might not be significantly different from background, and so a
negative fractal test result could undervalue the find. For these
reasons, all of the finds in Table 1 are of potential interest for
lunar archaeological reconnaissance.
4.2. Morphology
There are two
main types of finds.
Quasi-rectangular patterns of depressions ('wafers')
- About 69% of the
finds are of this type. A wafer is a cluster of rectangular
depressions with rectangular ridges between them. Such a pattern may
be seen in the example in Fig. 5. Presumably, an isolated, single
rectangular depression could be considered an extreme form of this
type. Moreover, there are transitional forms from rectangular
patterns of craterlets to wafers. In Table 1 wafers have
descriptions with d, dr, or p elements. The typical size of a wafer
is 1-3 km. The size of a depression in a wafer is 0.1-2 km.
Quasi-rectangular patterns of depressions occur in smooth terrains,
e.g., between craters, or at the bottom of large-scale craters.
 |
| Fig. 5. The example of a wafer find (image LHD5472Q.287). |
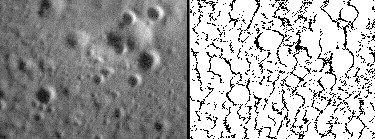
Quasi-rectangular lattices of lineaments ('lattices') -
These comprise about
30% of the finds. A lattice is a complex of interlacing, broken
ridges or furrows, which form a quasi-rectangular pattern (Fig. 6).
This morphological type is present in Table 1 as complexes of r
and/or f elements without d. These lineaments have a typical width
of ~50 m and cover ~1 sq. km. in territory. Lattices occur on slopes
and hill tops, where the regolith layer is thinnest. Apparently,
what we see is subsurface structure rather than some organization of
regolith.
 |
| Fig. 6. The SAAM processing reveals the lattice pattern on the HIRES image LHD5165R.171. |
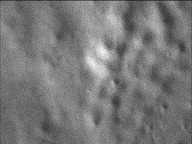
 |
| Fig. 7. Hollow quadrangle hills with rectangular depressions around them could be lunar embankments. |
Besides
wafers and lattices, quadrangle hills are worthy of separate
description (Fig. 7). The hills are located in formations of both
morphological types. The dimensions of such hills are 0.3-1 km.
Usually the quadrangle hill has a craterlet on its top. Sometimes
the top depression is so large that the hill appears hollow.
Rectangular depressions around hills are a rarity on the Moon, but
are common for man-made mounds on Earth.
4.3. Interpretations
The possible
evolution of these structures over time can be visualized from the
available images. The reconstruction of wafer evolution is shown in
Fig. 8. The simplest, probably the first stage formation, is a
regular pattern of craterlets (Fig. 8a). Hypothetically, this could
be the result of the collapse or drainage of regolith into
subsurface caverns. Expanding craterlets become angular. Then a
rectangular lattice of ridges appears between them (Fig. 8a,b). The
rectangular lineaments around the formation (Fig. 8c) show a regular
and local structure suggestive of subsurface caverns. A possible
cavern system is seen after its total collapse (Fig. 8d). The bottom
collapses (Fig. 8e) and slope terraces [17] in
rectangular depressions suggest several levels of caves.
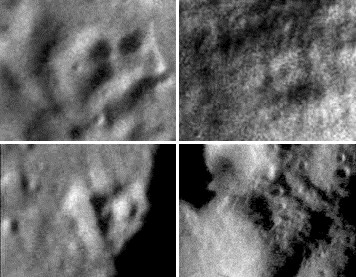
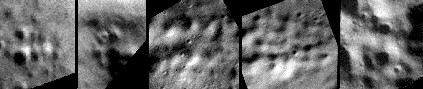 |
| Fig. 8. Wafer examples in evolutionary order, from left to right: (a) LHD0316A.083, (b) LHD0470B.112, (c) LHD5443Q.291, (d) LHD5472Q.287, and (e) LHD5661R.068. |
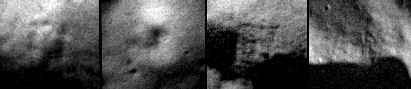 |
| Fig. 9. Lattice examples in evolutionary order, from left to right: (a) LHD0558B.072, (b) LHD5559Q.279, (c) LHD6749R.318, and (d) LHD6158R.320. |
The lattice
evolution could be interpreted in terms of erosion as well (Fig. 9).
Apparently, the first (simplest) stage of a lattice is the
quasi-rectangular system of narrow furrows/cracks (Fig. 9a). The
cracks expand (Fig. 9b) and transform into a quasi-rectangular
pattern of ridges (Fig. 9c). Fig. 9d shows a quadrangle mesa-like
hill surrounded by a ridge system (enhanced using a high-pass
filter). Apparently, such ridges are a relatively stable aspect of
the hill they reside on.
Intact
subsurface caverns or very eroded wafers and lattices are almost
invisible in low contrast images. Indeed, some rectangular patterns
are found in the relief-enhanced schemes (Fig. 10). A few elements
are discernable in the original images. For example, the lattice
seen in the bottom-right corner of the scheme in Fig. 4 is just
barely perceivable in the original image.
 |
| Fig. 10. Hidden rectangular patterns on the schemes (local extremities of relief) of HIRES images LHD0146A.210, LHD0331A.062, LHD0558B.072, LHD4691Q.253, LHD5243Q.208, and LHD6158R.320. |
 |
| Fig. 11. The air view of the Ancient Assyrian ruins of Assur resemble the lunar lattice in Fig. 6. |
These
rectangular systems of depressions and ridges resemble terrestrial
ruins. For example, the patterns in Figures 6 and 10 are similar to
the Ancient Assyrian ruins of Assur [18] (Fig.11).
For
comparison, the detailed fractal test (Section 3.2) is used to
compute the the 'artificiality parameter' (alpha) in Eq. (6)
over the random set of HIRES images (MOON), our finds (FINDS) and a
collection of air-space photos of terrestrial archaeological objects
[19], [20]
(ARCHAEOLOGY). Fig. 12 shows the resultant histograms. It is
possible that alpha values of the lunar finds are shifted
towards the geological background because of the thick regolith
cover. Still, some finds have the same alpha values as
terrestrial archaeological sites.
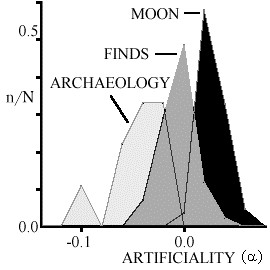 |
| Fig. 12. The artificiality parameter for the lunar background (MOON), the finds, and terrestrial archaeology. |
Many lunar
geologists explain rectangular depressions on the Moon in terms of
fractures (structural features) at the surface that were present
before the impact events which formed the craters. We have found
compact groups containing rectangular and round depressions of the
same size (Fig. 13). Wafers and lattices appear too localized and
regular in form to be tectonic features or jointing patterns
resulting from multiple impacts. These are reasons to doubt a
geological interpretation for all rectangular formations.
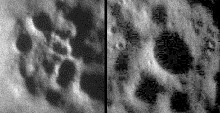 |
| Fig. 13. Argument against the geological fractures: the compact groups of neighbouring rectangular and round depressions of same size (LHD5705R.282 and LHD5814R.295). |
In proposed
lunar base concepts, the rectangular patterns of subsurface
constructions would be visible on the surface [21], [22], [23]. Such
complexes could thus appear as wafer or lattice patterns.
Subsurface, rectangular, multilevel caves are unknown in lunar
geology. However, they are usually considered in modern plans for
lunar bases, as are hollow hills (Fig. 14). Quadrangular and hollow
hills on the Moon are thus worthy of attention as well.
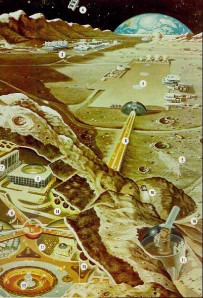 |
| Fig. 14. Modern concept of a lunar base within a hollow hill. Compare with Fig. 7. |
Of course,
some or all of our finds could be geological formations. But the
possibility that they could be archaeological features is so
important that it should not be ignored a priori . Ultimately, only human exploration of the Moon
will determine whether these features are artificial or natural in
origin.
5. Scientific Reaction
The reaction
of mainstream science to this study is perhaps the most interesting
result of our project. There is a paradoxical contradiction between
the vision expressed in science fiction and the agendas of
scientific research. Unfortunately, idea of artificial objects on
the Moon has been discredited by sensational press [24]. As a
result, serious lunar research is not of interest to editors of
scientific journals or even popular science magazines.
As an
experiment, popular reports of our work were submitted to
Archeologia
(France), Sky and
Telescope (USA), and
Spaceflight
(UK). None of them responded. Scientific American (USA) sent inspiring words: "I found your
discussion in the latest META news interesting. Please let me know
how the research progresses in the future... The search for such
artifacts is certainly an important one... As your and other
searches progress, we may want to have an article about the effort."
Not even the hint of interest in extraterrestrial archaeology has
yet appeared in Scientific American .
Correspondence with scientific journals is rather
predictable. For example, the reviewer of the Journal of the British
Interplanetary Society wrote: "The problem with Arkhipov's work is that he has not
tried to explain his features in any way other than in terms of
alien artifacts... Perhaps the author could be persuaded to develop
his technique and write a paper on that rather than its use in
finding ruins on the Moon?" Archaeologists, as a rule, don't
theorize on natural explanations. They explore in situ . To find, we must search. Unfortunately,
planetary geologists have no interest in conducting archaeological
searches. That is why even discussion on archaeological
reconnaissance of the Moon is taboo for the referees.
The reaction
of the SETI community is especially interesting. According to the
director of the SETI Institute, Dr. Seth Shostak, "I think the main
problem with taking serious action in these regards is the lack of
funding and the setting of priorities. This is, alas, always a
problem for SETI as there are still only a rather small number of
researchers involved, and they are presently more disposed to search
for signals than for artifacts." Even followers of E. von Daniken (
Ancient Astronauts
Society and
Archaeology,
Astronautics & SETI Research Association ) ignore the Moon. Although
the SETI League
, Society for Planetary SETI Research
(SPSR), and the
Russian SETI Center
support these
studies, few scientists dare to search for evidence of
extraterrestrial intelligence on the Moon.
Serious
interest in archaeological reconnaissance of the Moon is practically
nonexistent in the planetary science community. Yet, as revealed by
the SAAM project, patterns similar to terrestrial archaeological
sites do exist on the Moon. Hopefully, lunar scientists may someday
be more willing to consider the exciting possibility of non-human
artifacts on the Moon.
6. Conclusions
It is shown
that computerized archaeological reconnaissance of the Moon is
practical. The proposed methods can be used for more extensive lunar
survey, and for planetary SETI in general.
About 80,000
Clementine lunar orbital images have been processed, and a number of
quasi-rectangular patterns were found in accordance with Sagan's
criterion for the detection of intelligent activity in satellite
imagery. The morphological analysis of these finds leads to the
reconstruction of their evolution in terms of erosion. Two possible
evolutionary sequences can be constructed: 1) the collapse of
subsurface quasi-rectangular systems of caverns, and 2) the erosion
of hills with quasi-rectangular lattices of lineaments. In addition,
embankment-like, quadrangle and hollow hills with rectangular
depressions were also observed.
These finds
resemble terrestrial archaeological sites and modern lunar base
concepts. It is recommended that they be explored in situ as possible artifacts.
A catalogue
of promising objects for archaeological reconnaissance of the Moon
has been compiled. Whether they prove to be artificial or not, these
features are examples of unusual lunar geology and merit further
study.
Modern
science and society are not yet prepared for the archaeological
reconnaissance of the Moon. Nevertheless, a discussion on lunar
archaeology will likely occur following the eventual colonization of
our satellite.
Geological
interpretations of lunar relief are well known, but we must take
into consideration other possibilities as well.
Acknowledgements
The author is
very grateful to Dr. Y.G. Shkuratov for access to the Clementine
CDs. I also thank Dr. M.Carlotto, Dr. J.Fiebag, Dr. T.Van Flandern
and Dr. J.Strange for discussions and support.
Appendix: Complete Catalogue of Finds
|
Longitude [25] |
Latitude |
File [26] |
Elements |
|
11.05 |
89.16 |
LHD5814R.295 |
d |
|
13.63 |
85.57 |
LHD5741R.295 |
d |
|
16.08 |
-76.10 |
LHD0480B.030 |
f |
|
20.03 |
-81.24 |
LHD0395A.160 |
p |
|
20.69 |
-79.70 |
LHD0159B.293 |
dr |
|
22.50 |
80.63 |
LHD5686R.160 |
r |
|
25.38 |
75.50 |
LHB5443Q.291 |
prf |
|
28.25 |
-76.50 |
LHD0132B.290 |
dr |
|
28.35 |
79.10 |
LHD5502Q.290 |
f |
|
31.16 |
80.78 |
LHD5833R.157 |
f |
|
31.21 |
78.82 |
LHD5256Q.293 |
d |
|
32.97 |
79.60 |
LHD5538Q.289 |
f |
|
33.55 |
77.27 |
LHD5715Q.156 |
dr |
|
33.57 |
77.05 |
LHD5713Q.156 |
dr |
|
35.45 |
81.20 |
LHD5555R.289 |
rfd |
|
37.00 |
77.58 |
LHD5472Q.287 |
pr |
|
37.18 |
79.86 |
LHD5525Q.287 |
df |
|
41.93 |
-82.88 |
LHD0280A.151 |
fd |
|
43.09 |
86.94 |
LHD5724R.286 |
dr |
|
44.05 |
-75.87 |
LHD0445B.151 |
r |
|
51.34 |
-83.68 |
LHD0233A.147 |
f |
|
53.95 |
-83.54 |
LHD0287A.146 |
rd |
|
56.88 |
87.01 |
LHD5705R.282 |
dr |
|
60.29 |
79.20 |
LHD5559Q.279 |
d |
|
60.30 |
85.14 |
LHD5636R.280 |
p |
|
108.97 |
-76.82 |
LHD0412B.127 |
rhf |
|
109.85 |
-82.38 |
LHD0344A.126 |
d |
|
113.40 |
82.50 |
LHD5350R.260 |
fdr |
|
123.50 |
86.07 |
LHD5652R.126 |
df |
|
124.55 |
-82.47 |
LHD0282A.121 |
d |
|
128.05 |
80.00 |
LHD5375R.254 |
? |
|
128.25 |
-78.26 |
LHD0162B.253 |
f |
|
128.41 |
-76.13 |
LHD0191B.253 |
r |
|
128.83 |
82.91 |
LHD5459R.254 |
dr |
|
130.26 |
-82.91 |
LHD0073A.252 |
d |
|
130.33 |
-82.75 |
LHD0274A.119 |
rp |
|
130.52 |
79.32 |
LHD4691Q.253 |
pf |
|
130.71 |
80.68 |
LHD4722R.253 |
dr |
|
131.20 |
-78.77 |
LHD0111B.252 |
dr |
|
135.66 |
80.05 |
LHD4807R.251 |
? |
|
137.97 |
-84.74 |
LHD0276A.116 |
dr |
|
139.41 |
-86.30 |
LHD0184A.115 |
f |
|
145.91 |
77.84 |
LHD5288Q.247 |
f |
|
148.00 |
-81.36 |
LHD0248A.113 |
f |
|
148.41 |
-79.04 |
LHD0305B.113 |
d |
|
149.69 |
-84.26 |
LHD0231A.112 |
f |
|
150.71 |
-81.43 |
LHD0315A.112 |
rd |
|
151.29 |
-77.99 |
LHD0415B.112 |
d |
|
151.44 |
-76.24 |
LHD0470B.112 |
pr |
|
154.36 |
83.95 |
LHD6979R.244 |
p |
|
155.35 |
83.91 |
LHD5605R.112 |
dp |
|
156.86 |
83.25 |
LHD5564R.243 |
f |
|
159.68 |
-78.18 |
LHD0343B.109 |
pr |
|
164.46 |
76.18 |
LHD4993Q.240 |
rf |
|
164.51 |
81.34 |
LHD5173R.240 |
fd |
|
166.93 |
89.03 |
LHD5643R.114 |
dr |
|
167.15 |
80.91 |
LHD5286R.239 |
f |
|
169.86 |
81.35 |
LHD5175R.238 |
d |
|
169.87 |
79.18 |
LHD5107Q.238 |
dr |
|
171.02 |
-81.44 |
LHD0095A.238 |
p |
|
179.43 |
89.72 |
LHD5696R.248 |
fp |
|
190.15 |
-77.39 |
LHD0469B.098 |
rf |
|
191.53 |
83.32 |
LHD5417R.230 |
pr |
|
191.54 |
83.21 |
LHD5416R.230 |
r |
|
192.67 |
-80.56 |
LHD0308A.097 |
r |
|
192.83 |
-81.40 |
LHD0096A.230 |
dr |
|
192.90 |
-76.89 |
LHD0392B.097 |
f |
|
197.24 |
89.46 |
LHD5611R.108 |
drf |
|
200.20 |
78.82 |
LHD5279Q.227 |
dr |
|
224.67 |
-76.57 |
LHD0421B.085 |
dr |
|
224.72 |
-86.21 |
LHD0175A.083 |
r |
|
229.10 |
-80.45 |
LHD0316A.083 |
p |
|
230.32 |
-83.27 |
LHD0516A.082 |
pd |
|
232.01 |
-76.20 |
LHD0210B.215 |
f |
|
232.08 |
86.83 |
LHD5588R.217 |
fr |
|
242.82 |
87.26 |
LHD5629R.214 |
df |
|
243.37 |
82.05 |
LHD5628R.080 |
dr |
|
244.03 |
-81.12 |
LHD0146A.210 |
d |
|
244.99 |
85.05 |
LHD7605R.344 |
r |
|
246.08 |
81.88 |
LHD7638R.343 |
fh |
|
246.21 |
-82.25 |
LHD0142A.209 |
dr |
|
250.58 |
-85.48 |
LHD0193A.073 |
r |
|
251.14 |
-82.54 |
LHD0140A.207 |
r |
|
251.65 |
79.76 |
LHD5397Q.209 |
f |
|
254.56 |
79.99 |
LHD5250Q.208 |
f |
|
254.65 |
-80.58 |
LHD0148A.206 |
r |
|
258.78 |
-77.45 |
LHD0558B.072 |
f |
|
261.17 |
86.87 |
LHD5466R.208 |
dr |
|
266.18 |
-83.86 |
LHD0278A.068 |
r |
|
266.42 |
86.58 |
LHD5492R.206 |
dr |
|
268.33 |
87.79 |
LHD5595R.207 |
fp |
|
269.63 |
85.11 |
LHD5650R.072 |
d |
|
269.77 |
87.47 |
LHD5521R.206 |
dr |
|
272.70 |
82.72 |
LHD5562R.202 |
r |
|
273.41 |
79.55 |
LHD5545Q.069 |
d |
|
273.56 |
79.74 |
LHD5547Q.069 |
d |
|
281.47 |
-82.36 |
LHD0273A.063 |
fd |
|
284.08 |
87.80 |
LHD5717R.202 |
dr |
|
289.90 |
-80.94 |
LHD0149A.193 |
d |
|
290.49 |
87.58 |
LHD5661R.068 |
d |
|
291.22 |
-75.94 |
LHD0211B.193 |
d |
|
292.29 |
77.16 |
LHD5116Q.194 |
d |
|
292.30 |
77.07 |
LHD5110Q.194 |
d |
|
293.74 |
-80.73 |
LHD0315A.059 |
p |
|
296.28 |
-79.60 |
LHD0173B.191 |
dr |
|
297.82 |
84.15 |
LHD5528R.193 |
dr |
|
300.02 |
79.68 |
LHD5345Q.059 |
hd |
|
300.98 |
80.42 |
LHD5441R.191 |
d |
|
301.21 |
80.96 |
LHD5456R.191 |
dr |
|
301.28 |
85.55 |
LHD6749R.318 |
r |
|
301.55 |
-86.03 |
LHD0082A.320 |
h |
|
301.58 |
-88.19 |
LHD0119A.052 |
r |
|
306.10 |
-77.54 |
LHD0387B.055 |
dr |
|
311.45 |
86.05 |
LHD6158R.320 |
rh |
|
312.61 |
77.97 |
LHD5576Q.054 |
dr |
|
312.73 |
78.18 |
LHD5578Q.054 |
dr |
|
312.75 |
78.38 |
LHD5579Q.054 |
dr |
|
314.96 |
77.38 |
LHD5307Q.053 |
dr |
|
315.05 |
77.60 |
LHD5313Q.053 |
d |
|
315.37 |
77.84 |
LHD5314Q.053 |
d |
|
318.16 |
79.39 |
LHD5862Q.316 |
fdr |
|
320.67 |
79.28 |
LHD5916Q.315 |
dr |
|
323.28 |
86.62 |
LHD5574R.052 |
f |
|
329.05 |
-78.41 |
LHD0362B.047 |
fd |
|
338.05 |
86.90 |
LHD5972R.308 |
d |
|
341.12 |
81.88 |
LHA3621R.307 |
dr |
|
349.97 |
87.33 |
LHD5752R.303 |
pr |
|
351.42 |
85.96 |
LHD5165R.171 |
r |
References
- Wyndham, J.
Wanderers of Time
. London: Coronet
Books, 1973, p. 117-134.
- Clarke, A.C.
The Sentinel
. N.Y.: Berkley
Books, 1983, p. 143.
- Arkhipov, A.V.
" Earth-Moon System as a Collector of Alien Artefacts " , J. Brit. Interplanet. Soc
., 1998, 51, 181-184.
- Arkhipov, A.V., and Graham, F.G.
" Lunar SETI: A Justification " , in The Search for Extraterrestrial Intelligence
(SETI) in the Optical Spectrum II , ed. S.A. Kingsley & G.A. Lemarchand, SPIE
Proceedings, Vol. 2704, SPIE, Washington, 150-154, 1996.
- Ibid.
- Amalrik A.S.
& Mongait A.L. In
Search for Vanished Civilizations . Moscow: Acad. Sci. of USSR, 1959, p. 128-129
(in Russian).
- Sagan, C. The recognition of
extraterrestrial intelligence, Proc. R. Soc. Lond . B. 1975, 189, p.
143-153.
- Carl Sagan in
1962 on Lunar SETI, Selenology,
1995, 14, No. 1,
p.13.
- Holz, R.K.
" Cultural features imaged and observed from Skylab 4 " , In:
Skylab Explores the
Earth . NASA SP-380.
Washington: NASA, 1977, p.225-242.
- DoD/NASA,
Mission to the Moon, Deep Space Program Science Experiment, Clementine EDR
Image Archive . Vol.
1-88. Planetary Data System & Naval Research Laboratory,
Pasadena, 1995 (CDs).
- Carlotto, M.,
Lunar Mysteries, Quest
for Knowledge , 1997,
1, No. 3, p. 61.
- Carlotto,
M.J. and Stein, M.C., A Method for Searching for Artificial Objects
on Planetary Surfaces, J. Brit. Interplanet. Soc ., 1990, 43, p.
209-216.
- Stein, M.C.,
"Fractal image models and object detection," Proc. Society of Photo-optical Instrumentation
Engineers, Vol 845,
pp 293-300, 1987.
- Fiebag J.
Analyse tektonischer Richtungsmuster auf dem Mars. Kein Hinweise auf
knstliche Strukturen in der sdlichen Cydonia-Region, Astronautik, 1990, Heft 1, 9-13, S. 47-48.
- Coordinates
of the image center.
- DoD/NASA,
Mission to the Moon, Deep Space Program Science Experiment, Clementine EDR
Image Archive . Vol.
1-88. Planetary Data System & Naval Research Laboratory,
Pasadena, 1995 (CDs).
- Arkhipov A.V.
" Earth-Moon System as a Collector of Alien Artefacts " , J. Brit. Interplanet. Soc
., 1998, 51, 181-184.
- Hrouda B.
Der Alter Orient
. Hamburg:
C.Bertelsmann, 1991, S.115.
- Fowler M.J.F.
Examples of Satellite Images in Archaeological Application
(http://ourworld.compuserve.com/homepages/mjff/examples.htm)
- Roney J. Cerro de Trinchera
Archeological Sites, The Aerial Archaeology Newsletter. Vol. 1, No. 1, 1998
(http://www.nmia.com/~jaybird/AANewsletter/RoneyOnTrincheras.html
and She_in_shadow.html)
- Stroup T.L. Lunar Bases of the 20th
Century: What Might Have Been, J. Brit. Interplanet. Soc ., 1995, 48, p.
3-10.
- Matsumoto S.,
Yoshida T., Takagi K., Sirko R.J., Renton M.B., McKee J.W. Lunar
Base System Design, J.
Brit. Interplanet. Soc ., 1995, 48, p.
11-14.
- Sadeh W.Z.
& Criswell M.E. Inflatable Structures for a Lunar Base,
J. Brit. Interplanet.
Soc ., 1995,
48, p. 33-38.
- Childress
D.H. Extraterrestrial
Archaeology .
Kempton: Adventures Unlimited Press, 1999, p. 1-168.
- Coordinates
of the image center.
- DoD/NASA, Mission to the Moon, Deep Space Program Science Experiment, Clementine EDR Image Archive . Vol. 1-88. Planetary Data System & Naval Research Laboratory, Pasadena, 1995 (CDs).
|
Публикации с ключевыми словами:
SETI - Луна
Публикации со словами: SETI - Луна | |
См. также:
Все публикации на ту же тему >> | |